FlexRay Automotive Communication
FLEXRAY PROTOCOL:
FlexRay protocol is a distributed system within the automotive context developed by FlexRay consortium (BWM, Motorola and Philips). It is a communication bus means for a deterministic, fault-tolerant and high-speed bus system .FlexRay communication is developed in conjunction with automobile manufacturers and leading suppliers. It provides error tolerance and time-determinism performance requirements for x-by-wire applications. Where x by wire refers to drive-by-wire, steer-by-wire, brake-by-wire, etc.
For automobiles to continue and improve safety, increase performance, reduce environmental impact, and enhance comfort, the speed, quantity, and reliability of data communicated between a car’s electronic control units (ECU) must increase. Advanced control and management systems are combining multiple sensors, actuators and electronic control units are being to require synchronization and performance past what the existing standard which is provided by Controller Area Network (CAN). After some years of partnership with OEMs, tool suppliers, and end users, then the FlexRay standard has emerged as the in-vehicle communication buses to meet these new challenges in the next generation of automobiles. Adoption of a new networking standard in complex embedded designs like automobiles may take some time. Hence FlexRay will be solving high-end current and upcoming mainstream automobile’s network challenges, it will not displace the other two dominant in-vehicle standards are CAN and LIN. In order to optimize prize and reduce transition challenges, the next generation of automobiles will contain FlexRay for high-end applications.
| Bus | LIN | CAN | FlexRay |
| Speed | 40 kbit/s | 1 Mbit/s | 10 Mbit/s |
STRUCTURE OF FlexRay:
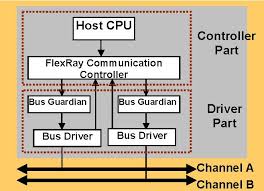
Basically, it transfers the information data between the host controller and the communication controller. The host controller processes the received data. The host controller decides what to do and what to send through the communication controller. Communication controller realizes all the functions of the FlexRay protocol. Communication protocol gets the information from bus driver and a bus guardian (BG). Bus guardian is assigned to each FlexRay transceiver. It only allows the FlexRay transceiver to place data received from the FlexRay controller on the bus if it conforms to the communication schedule.B us guardian can recognize synchronization and communication errors.
SPECIFICATIONS OF FlexRay:
- Baud rate of FlexRay communication is 10 Mbps
- Number of the channel for one node is about 2 / 1 ch (optional)
- Uses Bus and star network topology
- Works on a time-triggered and event-triggered communication
- Flex Rays data length code is 254 bytes
- The only data frame is used for transmission
- Has 3 error status transition as normally active, normally passive, halt
- having crystal oscillator
- Bus length about 22 meters in an active star
NETWORK TOPOLOGY;
Network topology means that the layout of the connections (links, nodes) of a computer network. There are two main types of topology. Network topologies are classified as physical and logical. Further, it is classified in to active and passive.
Passive network topology:
- Point to point connection
- Line topology
- Passive stat topology
Active network topology:
- Active star topology
- Derived topology
- Active star with redundant bus
- Cascade active star topology
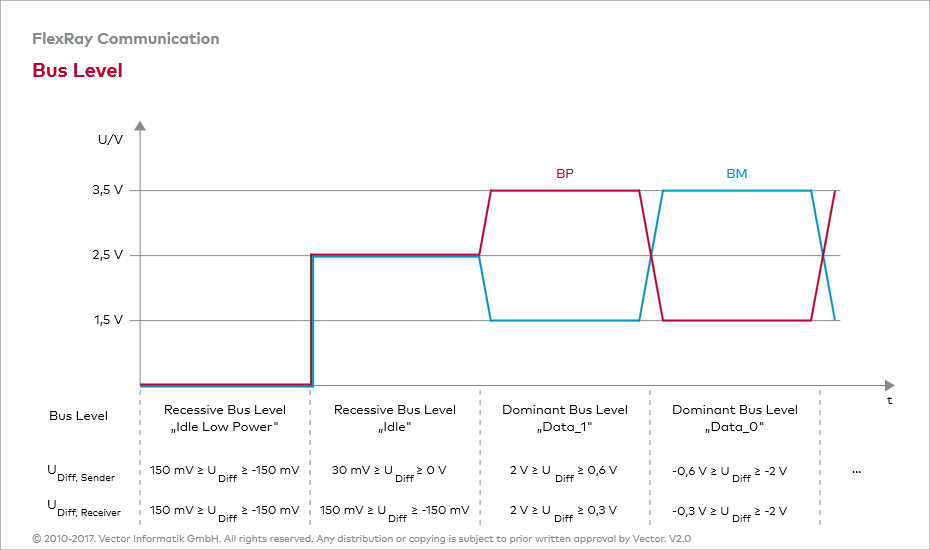
FLEXRAY BUS:
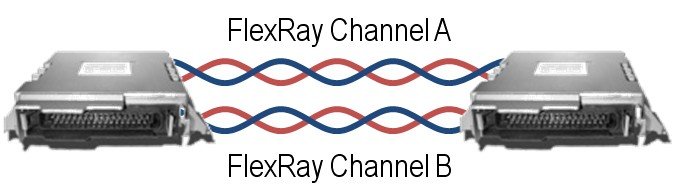
FlexRay uses differential signal transmission and NRZ encoder. It has two communication lines – Bus Plus (BP) and Bus Minus (BM). Termination registers with values between 80 and 110 ohms must be used. The physical layer defines four bus levels. Dominant_differential voltage not equal to 0 V. Recessive_differential voltage of 0V (Idle & low power).
BUS ACCESS POINT:
FlexRay uses two methods for granting bus access to nodes
- TDMA (Time Division Multiple Access)
- FTDMA (Flexible Time Division Multiple Access)
The TDMA method uses a communication schedule which is split into time slots. Each FlexRay node has one or more slots assigned in which it is granted access to the bus. The communication schedule is repeated periodically by all nodes. The FTDMA method is used to implement a dynamic segment which reserves a specific slot in the communication cycle that can be used by any node to transmit messages in a non-deterministic manner.
It’s a unique time-triggered protocol that provides options for deterministic data that arrives in a predictable time frame (down to the microsecond) as well as CAN-like dynamic event-driven data to handle a large variety of frames. FlexRay accomplishes this hybrid of core static frames and dynamic frames with a pre-set communication cycle that provides a pre-defined space for static and dynamic data. This part is configured with the network by the network designer. While CAN nodes only needed to understand the correct baud rate to communicate, nodes on a FlexRay network must know how all the pieces of the network are configured in order to communicate.
With any multi-line bus, it will communicate only one node can electrically write data to the bus at a time. If two nodes were to write at the same time, we end up with contention on the bus and data becomes corrupt. There are many numbers of schemes used to prevent contention on a bus. For example, CAN protocol used an arbitration scheme where nodes will yield to other nodes if they see a message with higher priority being sent on a bus. While flexible and easy to expand, this system does not allow for very high data rates and cannot guarantee the timely delivery of data.
FlexRay manages multiple nodes with a Time Division Multiple Access schemes. Every FlexRay node is synchronized to the same clock, and each node waits for its turn to write on the bus. Because the timing is compatible in a TDMA design, FlexRay is able to guarantee determinism or the consistency of data delivery to nodes on the network. This provides advantages for systems that depend on up-to-date data between nodes.
Embedded networks look something differs from PC-based networks. In that network, they have a closed configuration and do not change once they are assembled in the production product. This eliminates the need for additional mechanisms to automatically discover and configure devices at run-time, much like a PC, when joining a new wired or wireless network. By designing network configurations ahead of time, network designers save significant cost and increase the reliability of the network.
For a TDMA network such as FlexRay to work properly, every node should configure properly. Then, the FlexRay benchmark is conformable to maximum types of different networks and allows network designers to make trade-offs between network update speeds, deterministic data volume, and dynamic data volume among other parameters.
Each FlexRay network may be different, so each node must be programmed with proper network parameters before it can participate on the bus. To manage the facilities of network configurations between all nodes, FlexRay committee systematized standard for the storage and transfer of these parameters in the engineering process.