Variable Frequency Drive is used to control induction motors, and controls the motor by varying its supply frequency by converting AC supply into DC known as rectification and again it converts it into AC know as inverter operation, In inverting operation it uses IGBT for switching the voltage in the certain time intervals to adjust the frequency, then controls the power to the motor, As result we can change the speed and direction, and we can change the torque characteristics for more efficient use in applications and thus reducing the power consumption, since in the world induction motors are consuming one by third of the total electricity.
While applying the power supply to motor, VFD can vary its frequency and voltage also, so it can control the voltage applied to the motor, in VFD we can set parameters on how we are applying voltage on drive, there are some methods.
There are 4 common types of motor control methods used to control induction motors connected to a VFD. They are: V/f (volts-per-hertz), V/f with encoder, Open Loop Vector, and Closed Loop Vector.
Encoder
For accurate speed detection we use motor encoders, it is an electro-mechanical device mounted on the rear of a motor case and coupled to the motor shaft. Motor shaft rotation will generate a series of electrical pulses per revolution(PPR). These pulses are relayed back to the VFD and used as speed feedback.
Volts/Hertz
It is a simplest method and requires less parameters to configure in the VFD know as ‘Volts per Hertz’, in this method you don’t need to use any feedback mechanism for speed detection, for motors we usually use encoders for speed detection,
The V/f control method is used when there is a requirement for high frequency operation. Another advantage is that you can connect multiple motors into single VFD, V/f is the only control method which allows for multiple motors to be run off of a single VFD. When running multiple motors, all motors will start and stop at the same time, as well as follow the same speed reference.
Some demerits are, the VFD has no feedback that the motor shaft is rotating at the set speed reference. Additionally, starting torque of the motor is limited to 150%, but this will be more than enough starting torque for most variable torque applications. In most variable torque fan and pump application is using the V/f control method.
V/f with Encoder
If your application requires a speed accuracy and need to run at higher frequency reference, an encoder can be used with V/f Control method, the encoder feedback enhances the V/f control with speed accuracy at +/- 0.03% of maximum frequency.
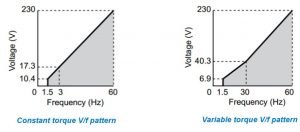
V/f pattern controls the output voltage. This support high speed control without high dynamic response since the voltage and frequency are predetermined. This method does not see often, Investment in encoder and PG card does not provide better the results. Starting torque, speed response, and speed control range are all identical to the open loop V/f control method. Higher operating frequency is limited by the encoder’s PPR.
Open Loop Vector
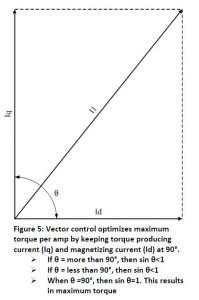
Open Loop Vector (OLV), sometimes called sensor-less vector, is much different than the V/f control method. In its name “Open loop” specify there is no encoder being used, so no feedback is obtained. The aim of the OLV control method is to provide greater and more dynamic motor control. Vector control is used to achieve independent control of motor speed and motor torque, similar to how a DC motor is controlled.
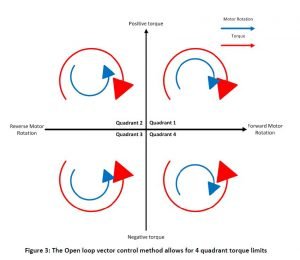
By employing OLV motor can generate 200% rated torque @ 0.3 Hz. Many Applications requires higher starting torque at lower speeds. In this method we can configure four-quadrant torque limits. Torque limits are usually used to limit motor torque to prevent damage to equipment, machinery, or product. Torque limits are broken into four different quadrants (Figure) dependent on the motor direction (Forward or Reverse) and whether the motor is motoring or regenerating. A Motor Operated Valve which need a torque limit to prevent over-torqueing the valve closing would require a torque limit set-up for Quadrant.
With advantages of torque limits, the OLV control method has a higher speed response of 10 Hz which can provide more dynamic response to impact loads. An example of an application which can have impact loads would be a rock crusher. The load is constantly changing dependent on the size and quantity of rocks being processed through the crusher.
Closed Loop Vector
This is highest performing control method. The Closed Loop Vector (CLV) motor control method uses a vector algorithm to determine out
put voltage just like the OLV method. The key difference is now an encoder is interfaced. Encoder feedback coupled with the vector control method can provide 200% motor starting torque at 0 rpm. This feature is best suitable for applications which require holding a load and not moving. Applications can include elevators, cranes, and hoists.
The encoder feedback can provide highest speed response, over 50 Hz, and also the highest speed control ranges 1:1500. In addition to these high performance operating specs, the CLV method also has the ability to run the motor in torque control mode. Torque control mode allows for the VFD to directly control motor torque instead of motor speed. This is necessary for any application where torque takes priority over speed. Winder, reminders, capping, and web applications are some good examples of when torque control is utilized.