
Introduction
The CAN bus was developed by BOSCH as a multi-master, message broadcast system that specifies a maximum signaling rate of 1 megabit per second (bps). Unlike a traditional network such as USB or Ethernet, CAN does not send large blocks of data point-to-point from node A to node B under the supervision of a central bus master. In a CAN network, many short messages like temperature or RPM
are broadcast to the entire network, which provides for data consistency in every node of the system.
CAN is an International Standardization Organization (ISO) defined serial communications bus originally developed for the automotive industry to replace the complex wiring harness with a two-wire bus. The specification calls for high immunity to electrical interference and the ability to self-diagnose and repair data errors. These features have led to CAN’s popularity in a variety of industries including building
automation, medical, and manufacturing.
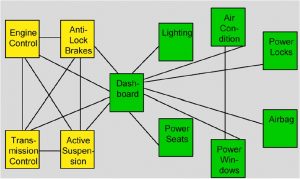
BEFORE CAN BUS
AFTER CAN BUS 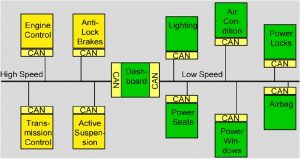
The CAN communications protocol, ISO-11898: 2003, describes how information is passed between devices on a network and conforms to the Open Systems Interconnection (OSI) model that is defined in terms of layers. Actual communication between devices connected by the physical medium is defined by the physical layer of the model. The ISO 11898 architecture defines the lowest two layers of the seven
layer OSI/ISO model as the data-link layer and physical layer in below diagram.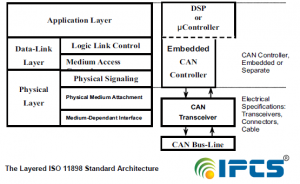
the application layer establishes the communication link to an upper-level application specific protocol such as the vendor-independent CANopen™ protocol. This protocol is supported by the international users and manufacturers group, CAN in Automation (CiA). Additional CAN information is located at the CiA Web site, can-cia.de. Many protocols are dedicated to particular applications like industrial automation, diesel engines, or aviation. Other examples of industry-standard, CAN-based protocols are KVASER’s CAN Kingdom and Rockwell Automation’s DeviceNet
Standard CAN or Extended CAN
The CAN communication protocol is a carrier-sense, multiple-access protocol with collision detection and arbitration on message priority (CSMA/CD+AMP). CSMA means that each node on a bus must wait for a prescribed period of inactivity before attempting to send a message. CD+AMP means that collisions are resolved through a bit-wise arbitration, based on a pre programmed priority of each message in the identifier field of a message. The higher priority identifier always wins bus access. That is, the last logic high in the identifier keeps on transmitting because it is the highest priority. Since every node on a bus takes part in writing every bit “as it is being written,” an arbitrating node knows if it placed the logic-high bit on the bus. The ISO-11898:2003 Standard, with the standard 11-bit identifier, provides for signaling rates from 125 kbps to 1 Mbps. The standard was later amended with the “extended” 29-bit identifier. The standard 11-bit
identifier field in the below image provides for 211, or 2048 different message identifiers, whereas the extended 29- bit identifier in the below image provides for 229, or 537 million identifiers.
Standard CAN

• SOF–The single dominant start of frame (SOF) bit marks the start of a message, and is used to synchronize the nodes on a bus after being idle.
• Identifier-The Standard CAN 11-bit identifier establishes the priority of the message. The lower the binary value, the higher its priority.
• RTR–The single remote transmission request (RTR) bit is dominant when information is required from another node. All nodes receive the request, but the identifier determines the specified node. The responding data is also received by all nodes and used by any node interested. In this way, all data being used in a system is uniform.
• IDE–A dominant single identifier extension (IDE) bit means that a standard CAN identifier with no extension is being transmitted.
• r0–Reserved bit (for possible use by future standard amendment).
• DLC–The 4-bit data length code (DLC) contains the number of bytes of data being transmitted.
• Data–Up to 64 bits of application data may be transmitted.
• CRC–The 16-bit (15 bits plus delimiter) cyclic redundancy check (CRC) contains the checksum (number of bits transmitted) of the preceding application data for error detection.
• ACK–Every node receiving an accurate message overwrites this recessive bit in the original message with a dominate bit, indicating an error-free message has been sent. Should a receiving node detect an error and leave this bit recessive, it discards the message and the sending node repeats the message after rearbitration. In this way, each node acknowledges (ACK) the integrity of its data. ACK is 2 bits,
one is the acknowledgment bit and the second is a delimiter.
• EOF–This end-of-frame (EOF), 7-bit field marks the end of a CAN frame (message) and disables bitstuffing,
indicating a stuffing error when dominant. When 5 bits of the same logic level occur in succession during normal operation, a bit of the opposite logic level is stuffed into the data.
• IFS–This 7-bit inter frame space (IFS) contains the time required by the controller to move a correctly received frame to its proper position in a message buffer area.
Extended CAN

The Extended CAN message is the same as the Standard message with the addition of:
• SRR–The substitute remote request (SRR) bit replaces the RTR bit in the standard message location as a placeholder in the extended format.
• IDE–A recessive bit in the identifier extension (IDE) indicates that more identifier bits follow. The 18-bit extension follows IDE.
• r1–Following the RTR and r0 bits, an additional reserve bit has been included ahead of the DLC bit.
Arbitration
A fundamental CAN characteristic shown in diagram is the opposite logic state between the bus, and the driver input and receiver output. Normally, a logic-high is associated with a one, and a logic-low is associated with a zero – but not so on a CAN bus. This is why TI CAN transceivers have the driver input and receiver output pins passively pulled high internally, so that in the absence of any input, the device
automatically defaults to a recessive bus state on all input and output pins.
Bus access is event-driven and takes place randomly. If two nodes try to occupy the bus simultaneously, access is implemented with a nondestructive, bit-wise arbitration. Nondestructive means that the node winning arbitration just continues on with the message, without the message being destroyed or corrupted by another node. The allocation of priority to messages in the identifier is a feature of CAN that makes it particularly attractive for use within a real-time control environment.
The lower the binary message identifier number, the higher its priority. An identifier consisting entirely of zeros is the highest priority message on a network because it holds the bus dominant the longest. Therefore, if two nodes begin to transmit simultaneously, the node that sends a last identifier bit as a zero (dominant) while the other nodes send a one (recessive) retains control of the CAN bus and goes on to complete its message. A dominant bit always overwrites a recessive bit on a CAN bus.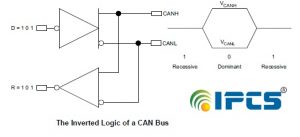
Note that a transmitting node constantly monitors each bit of its own transmission. This is the reason for the transceiver configuration of Figure 4 in which the CANH and CANL output pins of the driver are internally tied to the receiver’s input.
The propagation delay of a signal in the internal loop from the driver input to the receiver output is typically used as a qualitative measure of a CAN transceiver. This propagation delay is referred to as the loop time (tLOOP in a TI data sheet), but takes on varied nomenclature from vendor to vendor. The CAN arbitration process that is handled automatically by a CAN controller. Because each node continuously monitors its own transmissions, as node B’s recessive bit is overwritten by node C’s higher priority dominant bit, B detects that the bus state does not match the bit that it transmitted.
Therefore, node B halts transmission while node C continues on with its message. Another attempt to transmit the message is made by node B once the bus is released by node C. This functionality is part of the ISO 11898 physical signaling layer, which means that it is contained entirely within the CAN controller and is completely transparent to a CAN user.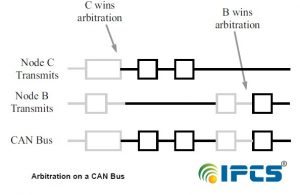
The allocation of message priority is up to a system designer, but industry groups mutually agree on the significance of certain messages. For example, a manufacturer of motor drives may specify that message 0010 is a winding current feedback signal from a motor on a CAN network and that 0011 is the tachometer speed. Because 0010 has the lowest binary identifier, messages relating to current values
always have a higher priority on the bus than those concerned with tachometer readings. In the case of DeviceNet™, devices from many manufacturers such as proximity switches and temperature sensors can be incorporated into the same system. Because the messages generated by DeviceNet sensors have been predefined by their professional association, the Open DeviceNet Vendors Association (ODVA), a certain message always relates to the specific type of sensor such as temperature, regardless of the actual manufacturer.
Message Types
The four different message types, or frames (see Figure 2 and Figure 3), that can be transmitted on a CAN bus are the data frame, the remote frame, the error frame, and the overload frame
The Data Frame
The data frame is the most common message type, and comprises the Arbitration Field, the Data Field, the CRC Field, and the Acknowledgment Field. The Arbitration Field contains an 11-bit identifier in Figure 2 and the RTR bit, which is dominant for data frames. In Figure 3, it contains the 29-bit identifier and the RTR bit. Next is the Data Field which contains zero to eight bytes of data, and the CRC Field which contains the 16-bit checksum used for error detection. Last is the Acknowledgment Field.
The Remote Frame
The intended purpose of the remote frame is to solicit the transmission of data from another node. The remote frame is similar to the data frame, with two important differences. First, this type of message is explicitly marked as a remote frame by a recessive RTR bit in the arbitration field, and secondly, there is no data.
The Error Frame
The error frame is a special message that violates the formatting rules of a CAN message. It is transmitted when a node detects an error in a message, and causes all other nodes in the network to send an error frame as well. The original transmitter then automatically re transmits the message. An elaborate system of error counters in the CAN controller ensures that a node cannot tie up a bus by repeatedly transmitting error frames.
The Overload Frame
The overload frame is mentioned for completeness. It is similar to the error frame with regard to the format, and it is transmitted by a node that becomes too busy. It is primarily used to provide for an extra delay between messages.
A Valid Frame
A message is considered to be error free when the last bit of the ending EOF field of a message is received in the error-free recessive state. A dominant bit in the EOF field causes the transmitter to repeat a transmission.
Error Checking and Fault Confinement
The robustness of CAN may be attributed in part to its abundant error-checking procedures. The CAN protocol incorporates five methods of error checking: three at the message level and two at the bit level. If a message fails any one of these error detection methods, it is not accepted and an error frame is generated from the receiving node. This forces the transmitting node to resend the message until it is
received correctly. However, if a faulty node hangs up a bus by continuously repeating an error, its transmit capability is removed by its controller after an error limit is reached. Error checking at the message level is enforced by the CRC and the ACK slots displayed in diagram. The 16-bit CRC contains the checksum of the preceding application data for error detection with a 15-bit checksum and 1-bit delimiter. The ACK field is two bits long and consists of the acknowledge bit and an acknowledge delimiter bit. be recessive bits. If a dominant bit is detected, an error is generated.
The bits checked are the SOF, EOF, ACK delimiter, and the CRC delimiter bits At the bit level, each bit transmitted is monitored by the transmitter of the message. If a data bit (not arbitration bit) is written onto the bus and its opposite is read, an error is generated. The only exceptions to this are with the message identifier field which is used for arbitration, and the acknowledge slot which requires a recessive bit to be overwritten by a dominant bit. The final method of error detection is with the bit-stuffing rule where after five consecutive bits of the same logic level, if the next bit is not a complement, an error is generated. Stuffing ensures that rising edges are available for on-going synchronization of the network.
Stuffing also ensures that a stream of bits are not mistaken for an error frame, or the seven-bit interframe space that signifies the end of a message. Stuffed bits are removed by a receiving node’s controller before the data is forwarded to the application. With this logic, an active error frame consists of six dominant bits—violating the bit stuffing rule. This is interpreted as an error by all of the CAN nodes which then generate their own error frame. This means that an error frame can be from the original six bits to twelve bits long with all the replies. This error frame is then followed by a delimiter field of eight recessive bits and a bus idle period before the corrupted message is re transmitted. It is important to note that the re transmitted message still has to contend for arbitration on the bus.
The data link and physical signaling layers of Figure 1, which are normally transparent to a system operator, are included in any controller that implements the CAN protocol, such as TI’s TMS320LF2812 3.3-V DSP with integrated CAN controller. Connection to the physical medium is then implemented through a line transceiver such as TI’s SN65HVD230 3.3-V CAN transceiver to form a system node as
shown in diagram
Signaling is differential which is where CAN derives its robust noise immunity and fault tolerance. Balanced differential signaling reduces noise coupling and allows for high signaling rates over twisted-pair cable. Balanced means that the current flowing in each signal line is equal but opposite in direction, resulting in a field-canceling effect that is a key to low noise emissions. The use of balanced differential
receivers and twisted-pair cabling enhance the common-mode rejection and high noise immunity of a CAN bus.
The High-Speed ISO 11898 Standard specifications are given for a maximum signaling rate of 1 Mbps with a bus length of 40 m with a maximum of 30 nodes. It also recommends a maximum unterminated stub length of 0.3 m. The cable is specified to be a shielded or unshielded twisted-pair with a 120-O characteristic impedance (Zo). The ISO 11898 Standard defines a single line of twisted-pair cable as the network topology as shown in Figure 6, terminated at both ends with 120-O resistors, which match the characteristic impedance of the line to prevent signal reflections
. According to ISO 11898, placing RL on a node must be avoided because the bus lines lose termination if the node is disconnected from the bus. The two signal lines of the bus, CANH and CANL, in the quiescent recessive state, are passively biased to ? 2.5 V. The dominant state on the bus takes CANH ? 1 V higher to ? 3.5 V, and takes CANL ? 1 V lower
to ? 1.5 V, creating a typical 2-V differential signal as displayed in diagram
The CAN standard defines a communication network that links all the nodes connected to a bus and enables them to talk with one another. There may or may not be a central control node, and nodes may be added at any time, even while the network is operating (hot-plugging).The nodes in the diagram could theoretically be sending messages from smart sensing technology and a motor controller.
An actual application may include a temperature sensor sending out a temperature update that is used to adjust the motor speed of a fan. If a pressure sensor node wants to send a message at the same time, arbitration ensures that the message is sent. For example, Node A in the diagram finishes sending its message as nodes B and C acknowledge a correct message being received. Nodes B and C then begin arbitration—node C wins the arbitration and sends its message. Nodes A and B acknowledge C’s message, and node B then continues on with its message. Again note the opposite polarity of the driver input and output on the bus.
Conclusion
CAN is ideally suited in applications requiring a large number of short messages with high reliability in rugged operating environments. Because CAN is message based and not address based, it is especially well suited when data is needed by more than one location and system-wide data consistency is mandatory. Fault confinement is also a major benefit of CAN. Faulty nodes are automatically dropped from the bus, which prevents any single node from bringing a network down, and ensures that bandwidth is always available for critical message transmission. This error containment also allows nodes to be added to a bus while the system is in operation, otherwise known as hot-plugging.The many features of the TI CAN transceivers make them ideally suited for the many rugged applications to which the CAN protocol is being adapted. Among the applications finding solutions with CAN are automobiles, trucks, motorcycles, snowmobiles trains, buses, airplanes, agriculture, construction, mining,and marine vehicles.