CAN PROTOCOL
Controller Area Network(CAN) protocol is a method adopted to improve the quality of automobiles in order to make them reliable, safe and fuel efficient. Rapid developments in technology lead to the replacement of some mechanical components to robust electronic devices in automobile industries. These electronic devices like engine management systems, central locking systems, airbags, active suspensions etc needs communication between them for better functioning. CAN Protocol can be said as a method of communication between these electronic devices embedded in an automobile.
Highly Suitable for the Automobile industry, why?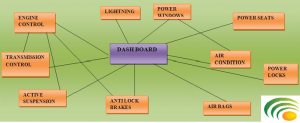
CAN protocol was an idea introduced by Robert Bosch in the year 1983. A Protocol is the set of rules, so CAN Protocol can also be defined as the set of rules for transmitting and receiving messages in a network of electronic devices. CAN Protocol is a message based protocol. Communication between ECUs and various sensors like the knock sensor, MAF, TPS, Vehicle speed etc is made possible in an effective way using this CAN bus Architecture. It doesn’t need a host computer. These nodes/ECUs(Electronic Control Units) will have hardware and software embedded inside them. Also, these nodes are connected by a common serial bus to transmit and receive messages. Every node has the access to read and write data on the CAN bus. That means this CAN protocol does not follow master-slave architecture.
Working
Considering a typical CAN network, it has various nodes that need to communicate with each other. Each node has a Host controller, a CAN Controller, and a CAN receiver. The host controller is responsible for the working of each node. A CAN frame carries a meaningful sequence of bit or byte data into the network. A node writes this well-defined structure called CAN frame into the network when it is ready to sent data. Before doing this, a node has to check whether the bus is available or not. Packets of data that carry information can be defined as Message. The information carried in every byte of a CAN message is defined in the CAN Protocol. Generally, protocols are of two types,
- Address-based protocol
- Message-based protocol
Address-based protocol: The data bytes has the address of the destination which the message was intended.
Message-based protocol: Here, the data packets of a CAN message( 10 bytes of data) have a predefined ID. This ID says the priority it has over other messages. CAN protocol is a message based protocol where each node decides whether the message received should be immediately discarded or keep processed. Suppose, a safety system router node is connected to automotive airbag sensor through CAN Network. This safety system router routes the data to all other nodes that deals with the safety system network. When the nodes receive the airbag sensor information, it will acknowledge if they receive the message properly. The dealings with the message will be decided later.
About IPCS Automation
IPCS Automation is an ISO certified training institute providing effective classes for the students from the leaders we are providing PLC Course in Chennai and also other parts of the globe. Get training from the leaders.