The speed control of motor acceleration and deceleration is a key factor when high
speed and precision position of motor is needed. The common speed controlling profiles
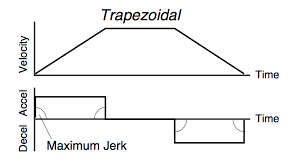
are trapezoidal and s-curve.In a trapezoidal move profile, the motor instantaneously
accelerates from zero to its maximum speed, travels at that speed for a specified time
(or distance), and then rapidly decelerates to zero. This move profiles is not ideal for the
motor, which require smooth travel, high positioning accuracy, or stability at the end of
the move. The process of rapid accelerating and decelerating leads to a phenomenon
known as jerk.
jerk is the rate of increasing or decreasing acceleration. generally jerk is undesirable
because it cause abrupt, jerky motion. The higher the jerk, the stronger the vibrations.
And these vibrations affects positioning accuracy, settling time, and cycle time.
To avoid jerk, it is necessary to reduce the rate of acceleration or deceleration. In
motion control systems, this is done by using an s-curve motion profile. In a trapezoidal
move profile, acceleration occurs rapidly and jerk is very severe. To reduce the amount
of jerk produced during the move, the transitions at the start and end of acceleration
and deceleration smoothed into an “s” shape. The resulting profile is called as an s-
curve move profile.
The tradeoff of utilizing a s-curve versus a trapezoidal move profile is that the general
time for the move is longer with a s-curve profile. This is because ramping acceleration
and deceleration takes longer time than the prompt increasing speed of a trapezoidal
move. In any case, the time advantage picked up by utilizing a trapezoidal move profile
might be invalidate by a more extended settling time, because of vibrations incited by
abnormal amounts of jerk. In addition, because jerk puts broad strain on mechanical
segments, regardless of whether a trapezoidal move is utilize as the basis, some
measure of smoothing normally applied to the acceleration and deceleration stages,
making the move profile more s shaped.

some common applications that benefit most from S-curve profiling:
Benefits Typical Applications
Faster Transfer Time High-speed stitching
High-speed pick & place machines
Plotters
Automated gantry systems
Robotics
Tracking systems control
Very Smooth Motion Chemical or Medical analysis automation
Elevators
Diagnostic scanners
Semiconductor equipment
Scientific instrumentation